Q1 Bunny
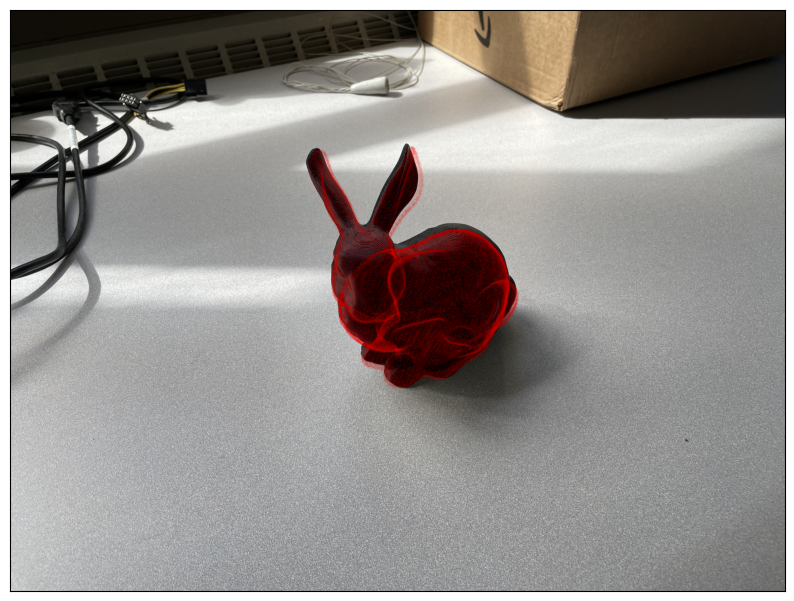
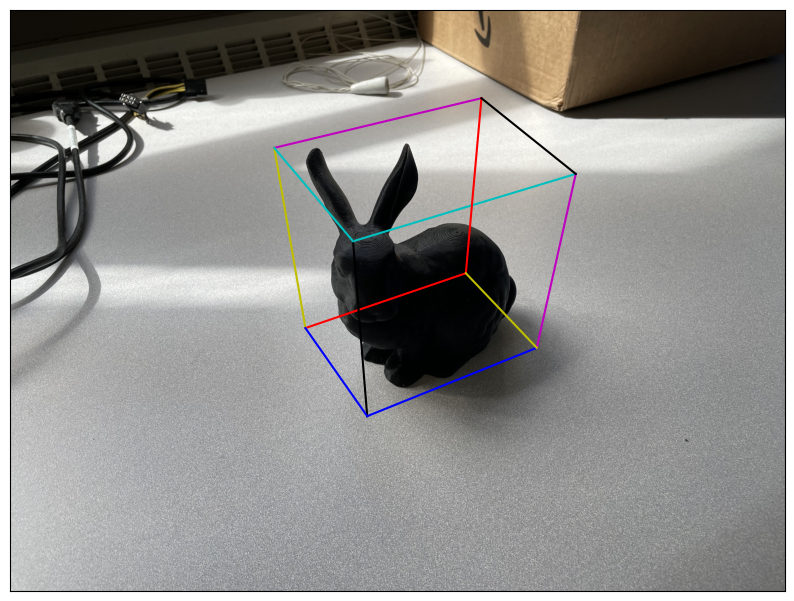
Camera matrix P
[[ 6.43e+03 -2.95e+03 1.15e+03 2.23e+03]
[-9.35e+02 -6.75e+03 2.03e+03 1.82e+03]
[ 5.79e-01 -1.42e+00 -7.35e-01 1.00e+00]]
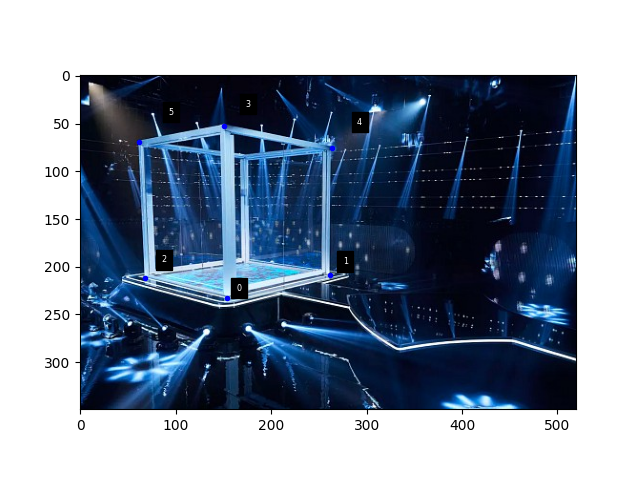
Q1 Cuboid
Q2 Cathedral
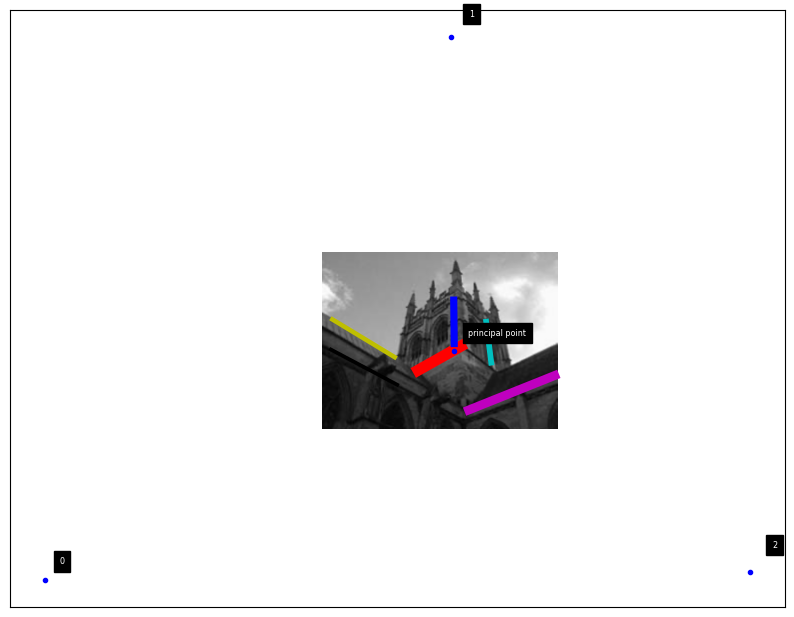
Construct $x^\top \omega y = 0$ and solve for $\omega$ to retrieve $K$:
\[\begin{bmatrix} x_1y_1 + x_2y_2 & x_1y_3 + x_3y_1 & x_2y_3 + x_3y_2 & x_3y_3 \end{bmatrix} \begin{bmatrix} w_{11} & w_{13} & w_{23} & w_{33} \end{bmatrix}^\top = 0\]K matrix
[[1.15e+03, 0.00e+00, 5.75e+02],
[0.00e+00, 1.15e+03, 4.32e+02],
[0.00e+00, 0.00e+00, 1.00e+00]]
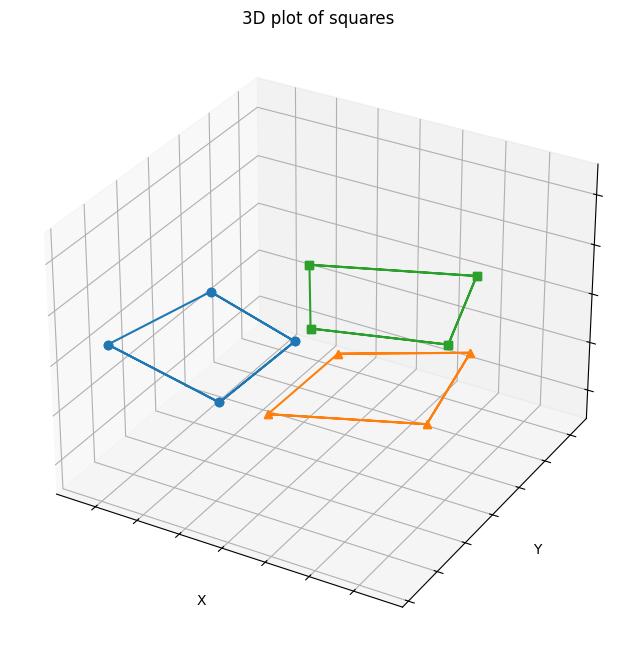
Q2 Squares
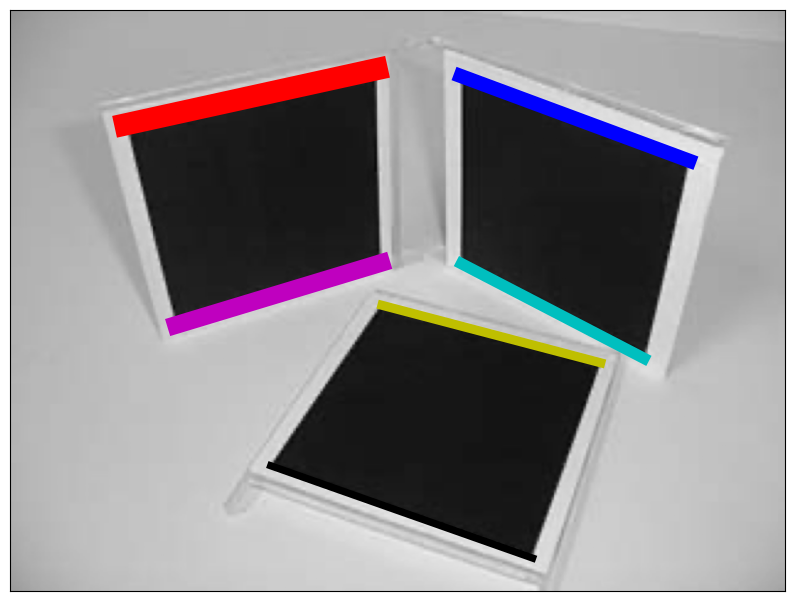
The A matrix, resulting from conditions $ h_1^T w hh_2 = 0$ and $h_1^T w h_1 = h_2^T w h_2$ \(\begin{bmatrix} x_1 y_1 & x_1 y_2 + x_2 y_1 & x_1 y_3 + x_3 y_1 & x_2 y_2 & x_2 y_3 + x_3 y_2 & x_3 y_3 \\ x_1^2 - y_1^2 & 2 x_1 x_2 - 2 y_1 y_2 & 2 x_1 x_3 - 2 y_1 y_3 & x_2^2 - y_2^2 & 2 x_2 x_3 - 2 y_2 y_3 & x_3^2 - y_3^2 \end{bmatrix}\)
K matrix
[[ 1.06e+03, -8.03e+00, 5.15e+02],
[ 0.00e+00, 1.08e+03, 3.76e+02],
[ 0.00e+00, 0.00e+00, 1.00e+00]]
angle 1: 66.03 angle 2: 92.50 angle 3: 94.97
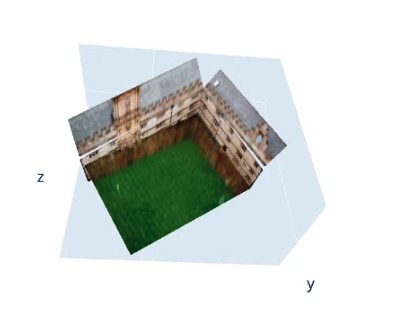
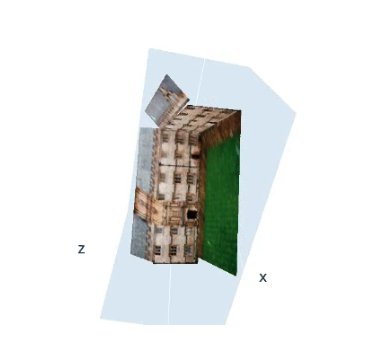
Q3 Walls
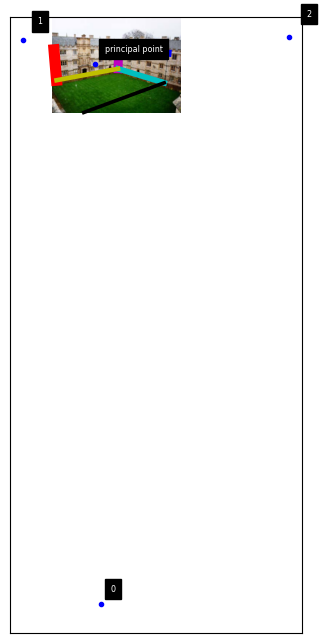
We use two reference points $p_i$: the yellow point is shared by four planes and the pink point is shared by three. These two points collectively represent all planes with normal $n_i$.
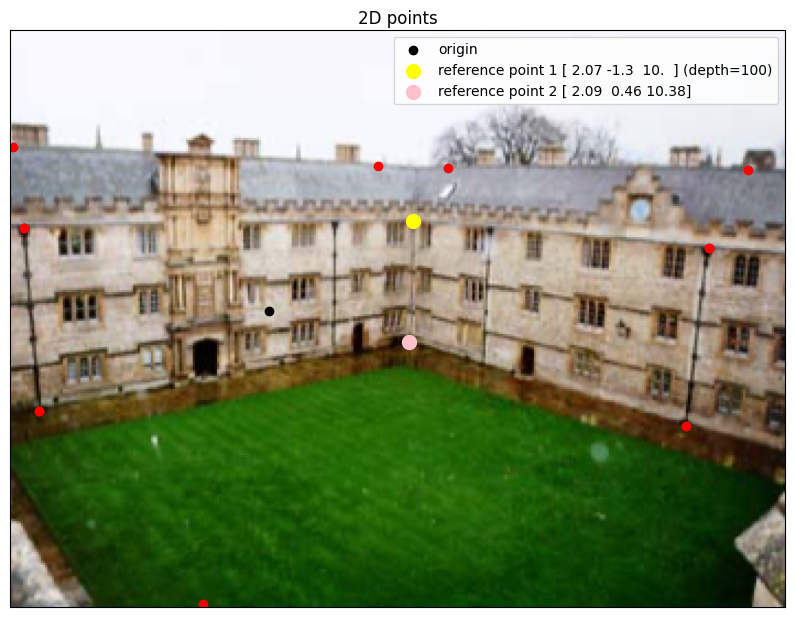
K matrix
[[892.47, 0. , 333.83],
[ 0. , 892.47, 361.11],
[ 0. , 0. , 1. ]]
For each ray $\vec{d}$ backprojected from each pixel, solve the equation $(t\vec{d} - p_i )^\top \vec{n_i} = 0$ for $t$. Thenm $t\vec{d}$ gives us the 3D point.